
The Ultimate Guide to NEMA 17 Stepper Motor Datasheets: Specifications and Applications
Introduction
NEMA 17 stepper motors are widely recognized for their versatility and efficiency in various applications including robotics, CNC machinery, and automation. Understanding the datasheet specifications for these motors is crucial for engineers and OEM buyers looking to harness their capabilities effectively. In this guide, we will delve into essential aspects of NEMA 17 stepper motors, including specifications, applications, and how to select the right motor for your needs.

What is a NEMA 17 Stepper Motor?
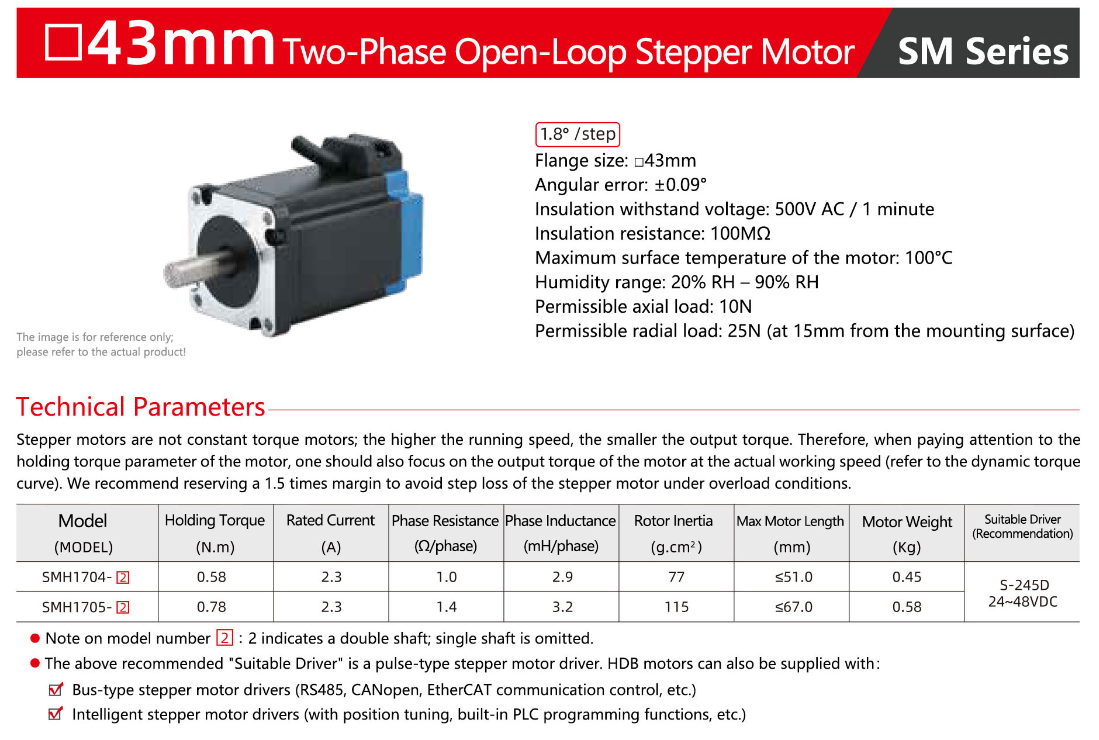
The NEMA 17 stepper motor is a type of electric motor that converts electrical pulses into discrete mechanical movements. It is classified by a faceplate size of 1.7 inches (43.2mm) square, making it a popular choice in compact design applications. NEMA 17 motors typically exhibit high holding torque and precise control, allowing for effective operation in systems that require accurate position control.
Key Specifications of NEMA 17 Stepper Motors
NEMA 17 stepper motors are characterized by a set of critical specifications including:
Holding Torque: Refers to the maximum torque the motor can withstand without moving. This specification is paramount in applications requiring precise positioning.
Current Rating: Represents the maximum current the motor can handle, impacting torque production.
Step Angle: The degree of rotation per step, commonly 1.8 degrees for NEMA 17 motors, amounting to 200 steps per revolution.
Wiring Configurations: Commonly available in bipolar and unipolar configurations, which influences the control method.
| Specification | Description |
|---|---|
| Holding Torque | Up to 45 Ncm, varying by model |
| Current Rating | Typically ranges from 1.5A to 2A per phase |
| Step Angle | 1.8° (200 steps/rev) |
| Wiring Configuration | Bipolar and Unipolar options available |
For a deeper understanding of controlling these motors, see our article on how to control a stepper motor with Arduino.
Applications of NEMA 17 Stepper Motors
NEMA 17 stepper motors find applications in various industries, thanks to their versatility:
3D Printing: Widely used to drive the X, Y, and Z axes in printers, providing the necessary motion control for additive manufacturing.
CNC Machinery: Employed in milling machines, routers, and laser cutters for precise cutting and shaping processes.
Robotics: Ideal for robotic arms and pick-and-place applications where exact position and repeatability are critical.
Aautomated Production Lines: Useful in assembly systems requiring reliable control of movement and positioning.
How to Read a NEMA 17 Stepper Motor Datasheet
When selecting a NEMA 17 stepper motor, understanding the datasheet is important. Key sections typically include:
Physical Dimensions: Information about the motor size and weight.
Electrical Characteristics: Including voltage, current, and resistance per phase.
Performance Specifications: Such as torque curves and speed ratings.
Recommended Operating Conditions: Temperature range and environmental conditions.
Utilizing datasheets helps buyers in assessing performance metrics to determine compatibility with specific applications.
Comparison with Other Stepper Motors
| Feature | NEMA 17 Stepper Motor | NEMA 23 Stepper Motor | NEMA 14 Stepper Motor |
|---|---|---|---|
| Faceplate Size | 1.7 inches | 2.3 inches | 1.4 inches |
| Torque | Up to 45 Ncm | Up to 100 Ncm | Up to 20 Ncm |
| Current Rating | 1.5A to 2A | 2A to 4A | 0.5A to 1A |
| Applications | Medium load, precision tasks | High load, industrial use | Lightweight, compact designs |
For additional insights into selecting the appropriate stepper motor for various applications, explore our stepper motor vs servo motor selection guide.
Troubleshooting Common Issues
NEMA 17 stepper motors may encounter issues such as:
Overheating: Often caused by running at excessive current. Solutions include adjusting the current limit on the driver.
Loss of Steps: Can occur due to inadequate current or overspeed conditions. Ensuring proper driver settings is crucial.
Resources on troubleshooting can be found in our article on overheating solutions.
Conclusion
NEMA 17 stepper motors serve as a fundamental component in many automation and robotics applications due to their precise control, reliable performance, and ease of integration. A comprehensive understanding of their datasheets will enable engineers to select the best options for their projects, ensuring optimal performance.
Frequently Asked Questions
Q1 What is the typical holding torque for NEMA 17 stepper motors?
Holding torque for NEMA 17 stepper motors typically ranges up to 45 Ncm, depending on the specific model and manufacturer.
Q2 How can I control a NEMA 17 stepper motor with Arduino?
You can control a NEMA 17 stepper motor using an Arduino board combined with a suitable driver, which provides the necessary signals to manage the motor's steps and direction.
Q3 What applications commonly utilize NEMA 17 stepper motors?
Common applications include 3D printers, CNC milling machines, robotic arms, and automated assembly systems, where precision and control are paramount.
Q4 What factors influence the performance of NEMA 17 stepper motors?
Key factors include the motor's current rating, step angle, and the quality of the driver used. Load conditions and heat dissipation also play important roles.
Q5 Are NEMA 17 stepper motors energy efficient?
NEMA 17 stepper motors are generally efficient for applications requiring precise control, but their energy consumption can vary based on the driving method and load.
Q6 What should I do if my NEMA 17 stepper motor is overheating?
Check that the motor is not being overdriven and that the driver settings match the motor's current rating. Allow sufficient cooling and avoid continuous high-load conditions.
Q7 How can I ensure my NEMA 17 motor is properly sized for my application?
Understanding the load requirements, desired speed, and control methods is essential. Consulting datasheets and specifications can help determine the correct sizing.