
What Is a Stepper Motor & How Does It Work?
A Practical Guide Engineers Actually Use
Introduction: Why Stepper Motors Still Matter in Automation
If you work with CNC machines, 3D printers, medical devices, or industrial automation systems, chances are you have already used a stepper motor—whether you realized it or not.
So, what is a stepper motor, and how does a stepper motor work in real-world applications? Beyond textbook definitions, stepper motors remain widely used because they provide predictable motion, simple control, and excellent low-speed torque without the complexity of closed-loop feedback systems.
At HDBMOTOR, stepper motors are still among the most requested motion components from OEM customers, especially in applications where reliability, repeatability, and cost control are more important than extreme speed.
What Is a Stepper Motor?
A stepper motor is a type of electric motor that rotates in discrete angular steps instead of continuous motion. Each electrical pulse sent to the motor corresponds to a precise mechanical movement.
Position control without an encoder
Speed defined by pulse frequency
Direction controlled digitally
Holding torque available at standstill
How Does a Stepper Motor Work?
To understand how a stepper motor works, it is helpful to focus on magnetic alignment rather than rotational speed.
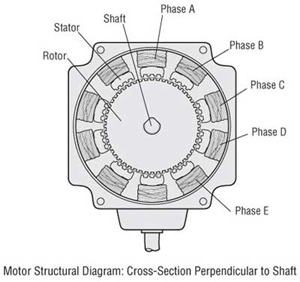
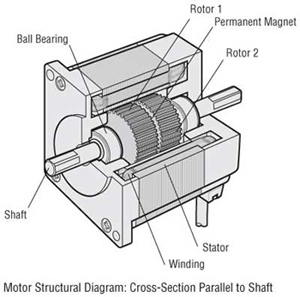
The stator contains multiple electromagnetic windings
The rotor is either a permanent magnet or a toothed iron structure
When current flows through a stator phase, a magnetic field is generated
The rotor moves to align with that magnetic field
Sequentially switching phases produces controlled rotation
Most industrial stepper motors operate with a step angle of 1.8° (200 steps per revolution) or 0.9° (400 steps per revolution).
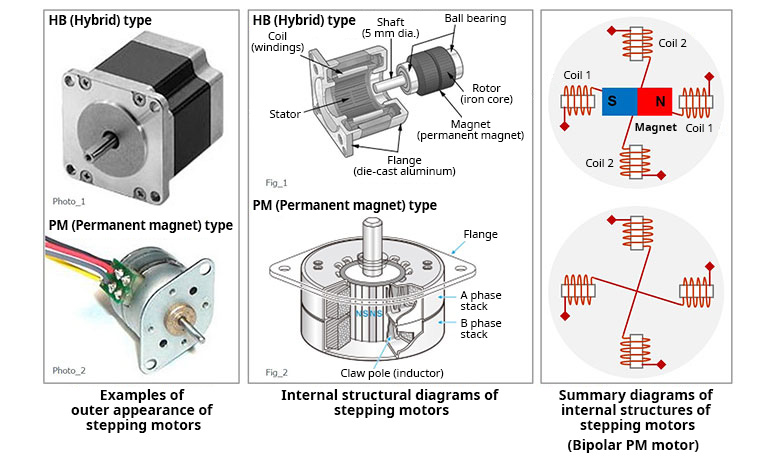
Types of Stepper Motors
Permanent Magnet (PM) Stepper Motors
PM stepper motors use permanent magnets in the rotor. They feature a simple structure and low cost but offer limited torque and positioning accuracy.
Variable Reluctance (VR) Stepper Motors
VR stepper motors do not use permanent magnets. The rotor aligns based on magnetic reluctance, providing fast response but low holding torque.
Hybrid Stepper Motors
Hybrid stepper motors combine PM and VR designs, offering higher torque, better resolution, and improved performance.
| Parameter | Hybrid Stepper Motor | Variable Reluctance (VR) | Permanent Magnet (PM) |
|---|---|---|---|
| Rotor Structure | Toothed rotor with permanent magnet | Soft iron toothed rotor | Permanent magnet rotor |
| Permanent Magnet | Yes | No | Yes |
| Operating Principle | Magnetic attraction & reluctance torque | Minimum magnetic reluctance | Magnetic attraction of permanent magnet |
| Typical Step Angle | 1.8° / 0.9° | 1.2° / 1.5° | 7.5° / 15° |
| Positioning Accuracy | High | Medium | Low |
| Output Torque | High | Low | Medium |
| Holding Torque (Power Off) | Strong | Nearly none | Available |
| Dynamic Performance | Excellent | Good | Fair |
| Speed Capability | Medium–High | High | Low–Medium |
| Mechanical Complexity | High | Low | Low |
| Cost Level | Medium–High | Low | Low–Medium |
| Control Difficulty | Medium | Medium | Low |
| Typical Sizes | NEMA 8 / 11 / 17 / 23 / 34 | Non-standard | 20mm / 25mm / 28mm |
| Typical Applications | CNC machines, 3D printers, industrial automation, robotics | Educational equipment, lab systems | Home appliances, instruments, valves |
| Market Adoption | ★★★★★ (Mainstream) | ★ | ★★ |
Why Stepper Motors Are Used in Automation
No feedback wiring required
Excellent low-speed torque
High positioning repeatability
Lower system cost
Easy integration with PLCs and motion controllers
Open-Loop vs Closed-Loop Stepper Systems
A common misconception is that stepper motors are inaccurate without feedback. Properly sized open-loop systems work reliably.
For variable loads or higher reliability, closed-loop steppers with encoders eliminate step loss while keeping stepper advantages.
Closed-Loop Stepper Motor Position Error Exceeded: Causes, Diagnosis & Solutions
Torque, Speed, and Holding Characteristics
Torque decreases as speed increases
Holding torque exists at zero speed
Resonance may occur at mid-speed ranges
Microstepping improves smoothness but not torque
Typical Stepper Motor Applications
CNC machines
3D printers
Packaging equipment
Medical pumps and analyzers
Textile and labeling machines
Industrial linear actuators
| Application | Key Requirements | Why Stepper Motor? | Typical Use Cases |
|---|---|---|---|
| CNC Machines | High precision, repeatability | Accurate position without feedback | X/Y/Z axes, tool changers |
| Medical Devices | Smooth, low vibration, high reliability | Predictable movement, microstep control | Pumps, diagnostic equipment, lab automation |
| Automation Equipment | Repetitive positioning, cost-effective | Easy integration, reliable performance | Conveyors, labeling, assembly robots |
Choosing the Right Stepper Motor
Required torque with safety margin
Operating speed range
Duty cycle and thermal limits
Load inertia and mechanical transmission
Driver compatibility
HDBMOTOR Stepper Motor Solutions
NEMA 8 to NEMA 34 stepper motors
High-torque and low-inertia designs
Integrated motor and driver solutions
Custom shaft, winding, and mounting options
Conclusion
Understanding what a stepper motor is and how a stepper motor works enables engineers to design reliable, precise, and cost-effective motion systems. Contact HDBMOTOR to discuss your application or request a technical recommendation.
Recommended Articles:
How to Control Stepper Motor Speed
Stepper Motor Continuous Jitter When Returning to Origin
Top 8 Features of Hybrid Stepper Motors You Should Know