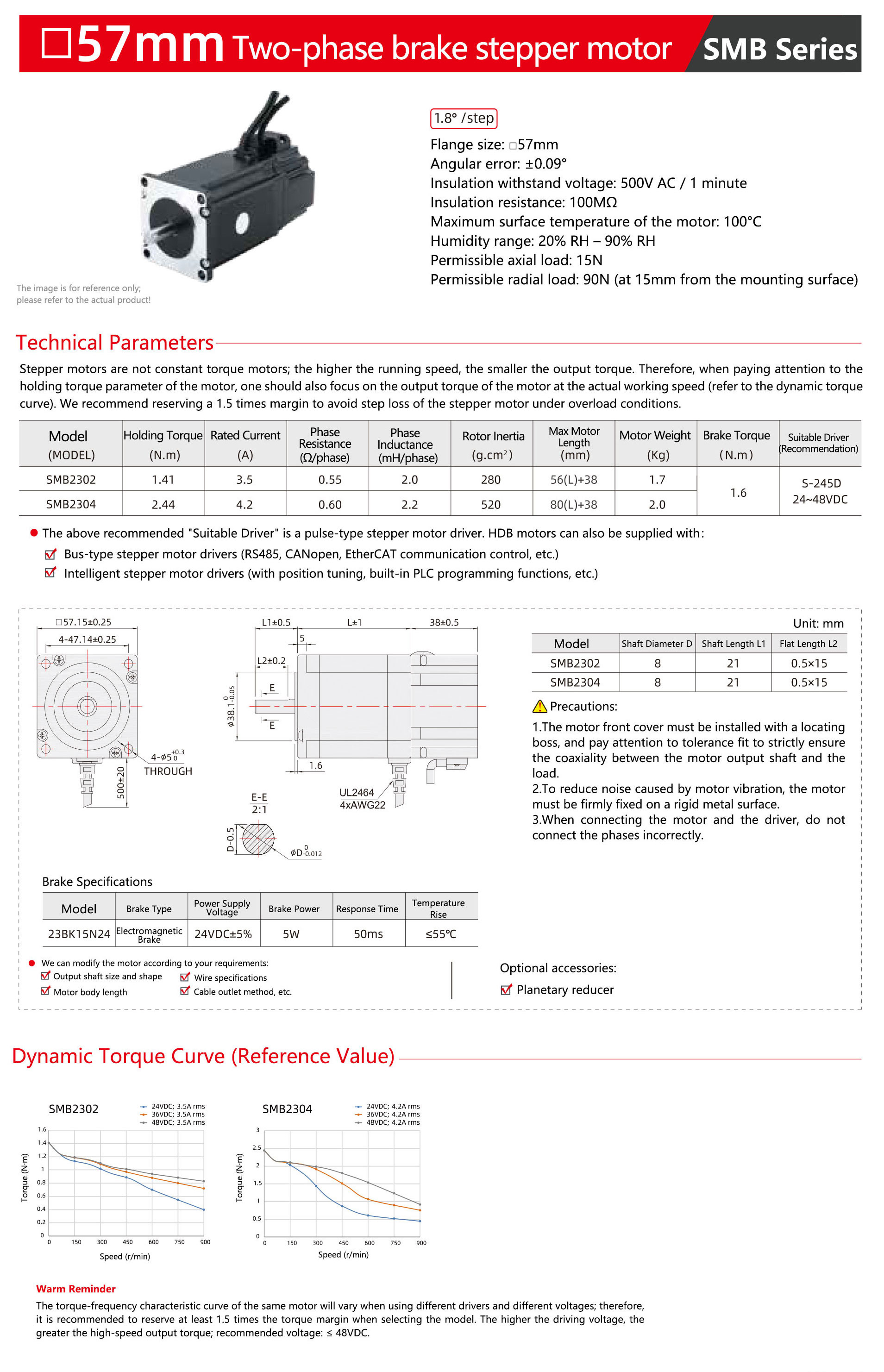
1.8° / step
Flange size: □57mm
Angular error: ±0.09°
Insulation withstand voltage: 500V AC / 1 minute
Insulation resistance: 100MΩ
Maximum surface temperature of the motor: 100°C
Humidity range: 20% RH – 90% RH
Permissible axial load: 15N
Permissible radial load: 90N (at 15mm from the mounting surface)
Technical Parameters
Stepper motors are not constant torque motors; the higher the running speed, the smaller the output torque. Therefore, when paying attention to the holding torque parameter of the motor, one should also focus on the output torque of the motor at the actual working speed (refer to the dynamic torque curve). We recommend reserving a 1.5 times margin to avoid step loss of the stepper motor under overload conditions.
Model (MODEL) | Holding Torque (N.m) | Rated Current (A) | Phase Resistance (Ω/phase) | Phase Inductance (mH/phase) | Rotor Inertia (g.cm²) | Max Motor Length (mm) | Motor Weight (Kg) | Brake Torque (N.m) | Suitable Driver (Recommendation) |
|---|---|---|---|---|---|---|---|---|---|
SMB2302 | 1.41 | 3.5 | 0.55 | 2.0 | 280 | 56(L)+38 | 1.7 | - | |
SMB2304 | 2.44 | 4.2 | 0.60 | 2.2 | 520 | 80(L)+38 | 2.0 | - |
Brake Torque for all models is 1.6 N.m
Suitable Driver Recommendation for these models is S-245D,24~48VDC
Notes
The above recommended “Suitable Driver” is a pulse-type stepper motor driver. HDB motors can also be supplied with:
Bus-type stepper motor drivers (RS485, CANopen, EtherCAT communication control, etc.)
Intelligent stepper motor drivers (with position tuning, built-in PLC programming functions, etc.)